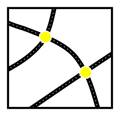
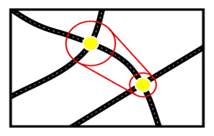
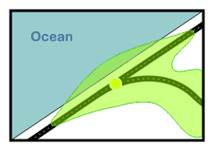
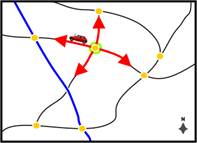
From a specified Start Point, Guzzler looks for nodes within the initial search radius.
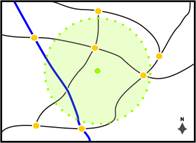
The initial search radius is a circular area around the Start Point. The size of this area can be changed in the settings file. By default, the initial search radius is 2 miles.
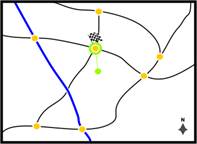
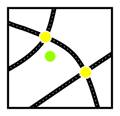
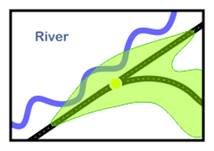
If there are nodes within the initial search radius, then the optimal node (Allows the furthest travel) is where the road network is joined. If multiple nodes fall within the initial search radius, then optimal node is chosen, the one which will travel on the fastest and furthest in the allotted time. The new methodology starts the calculation from the actual point and not the node start so a true calculation including potential off road time is calculated.
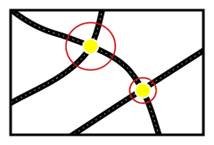
Some special-case logic is invoked when the outbound segments from nearest node are all one-way (e.g. on a highway. The new methodology now takes into account limited access roads and one ways.
In rare cases it is possible that no node is found within the initial search radius and therefore the road network is not joined. This is explained on.
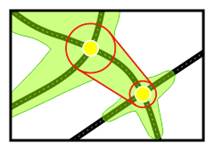
Time taken to reach the first node is now included in the calculation and the time to reach the end point.
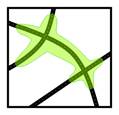
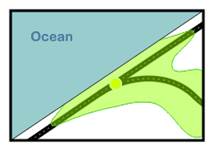
The road network is traced outwards from the nodes to find all the nodes reachable within the available time, subject to the varying speeds of different road segments and road network class.
Ferry routes are treated in the same way as road segments, and have speeds associated with them in the same way.
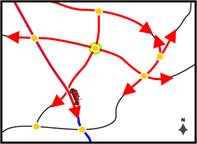
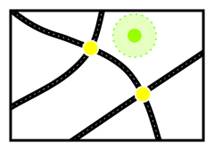
For each node reached, Guzzler calculates the remaining Drivetime and then looks again to see if any further nodes are reachable. This process is repeated for every node reached.
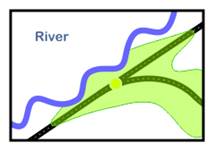
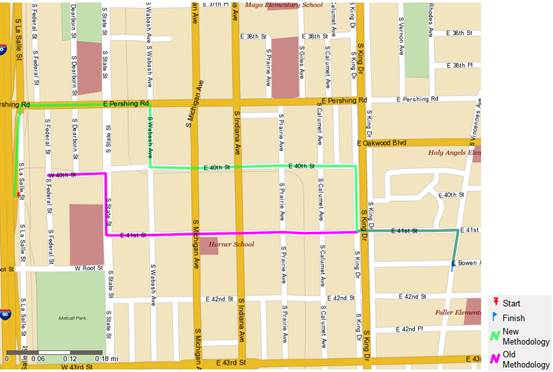
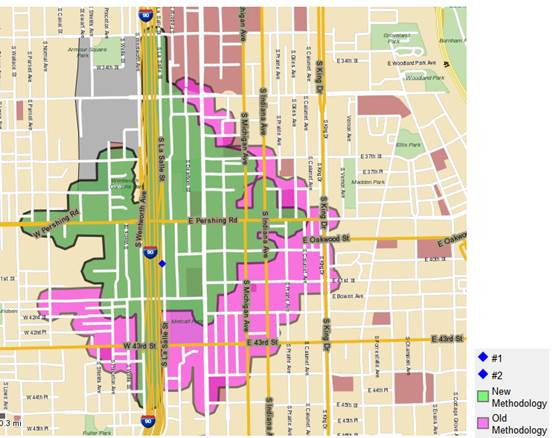
As the Drivetime calculation develops, we can see how different road speeds affect the shape. Faster roads produce longer tapering polygon ‘arms’, while those generated from slower roads are shorter and thicker.
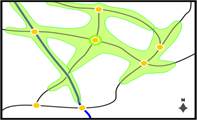
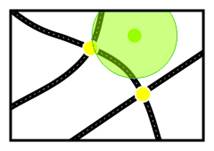
When no further nodes can be reached within the chosen Drivetime, any remaining time is added at Off-Road Speed (set at 2.5mph in the US). Remaining time is also added laterally from every node reached in the Drivetime creating the Off-Road Buffer, and the Drivetime Polygon is drawn. This will now be explained in more detail.