Metodología guzzler's DriveTime
Drivetimes calcular hasta qué punto se puede viajar en un período de tiempo determinado desde una ubicación elegida teniendo en cuenta la red vial subyacente y las distintas velocidades de la carretera. Por ejemplo, entender hasta dónde puede viajar desde un punto determinado puede ser útil para determinar la cobertura de servicio desde una base central, en términos de rango de vehículos. Los servicios de ambulancias, por ejemplo, son capaces de posicionar las unidades estratégicamente para la máxima cobertura y eficiencia. Los tiempos de respuesta se pueden predecir con precisión para cualquier ubicación, y los mapas se pueden producir indicando de un vistazo qué unidades están mejor ubicadas para responder a una necesidad en una ubicación particular.
Esta guía explica cómo guzzler's utiliza los datos de la red vial, incluyendo mapas de calles detallados, para producir resultados muy precisos.
Las velocidades de conducción para los diferentes tipos de carretera están contenidas dentro de un archivo de configuración, que se encuentra en el directorio de instalación de guzzler's de su producto de datos.
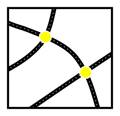
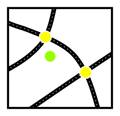
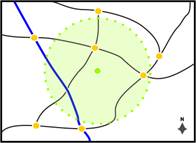
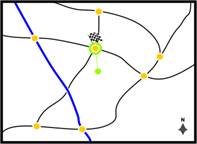
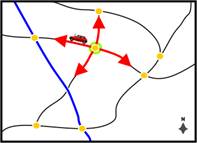
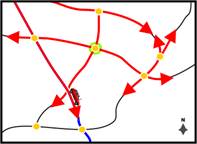
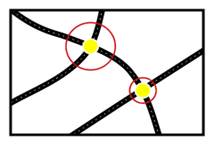
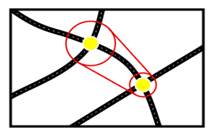
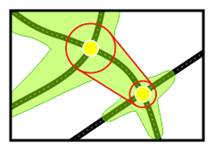
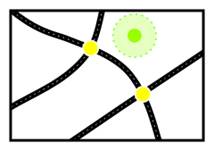
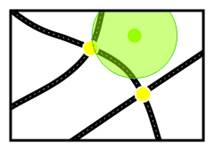
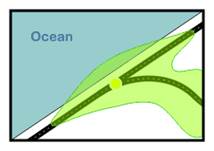
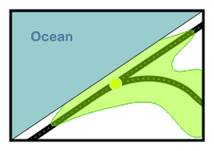
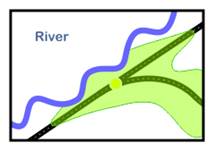
Los nodos están marcados en amarillo, carreteras locales en negro, autopistas en azul. Los cálculos de guzzler's, que no son visibles para el usuario, se muestran en rojo.