Méthodologie du temps de trajet Guzzler
Le temps de trajet calcule la distance qu’il est possible de parcourir pendant une période spécifiée à partir d’un emplacement choisi, en tenant compte du réseau routier sous-jacent et des différentes limitations de vitesse sur route. Par exemple, la compréhension de la distance à parcourir à partir d'un point donné peut être utile pour déterminer la couverture de service à partir d'une base centrale, en termes de gamme de véhicules. Les services d’ambulance, par exemple, peuvent positionner stratégiquement leurs unités afin d’optimiser la couverture géographique et l’efficacité. Le temps de réponse peut être estimé avec précision pour n’importe quel emplacement. Il est possible de générer des cartes indiquant au premier coup d’œil quelles unités sont les mieux placées pour répondre aux besoins d’un site donné.
Ce guide explique comment guzzler utilise les données du réseau routier, y compris la cartographie détaillée des rues, pour produire des résultats très précis.
Les vitesses de conduite pour les différents types de route sont contenues dans un fichier de paramètres, qui se trouve dans le répertoire d'installation guzzler de votre produit de données.
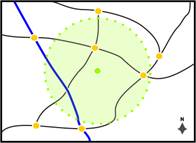
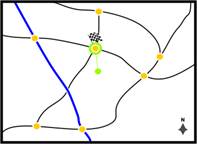
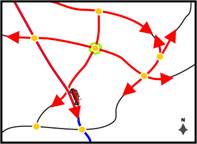
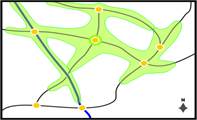
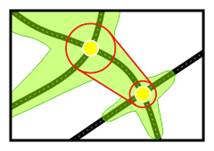
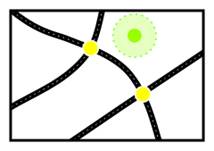
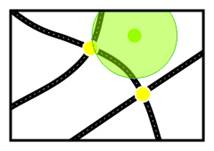
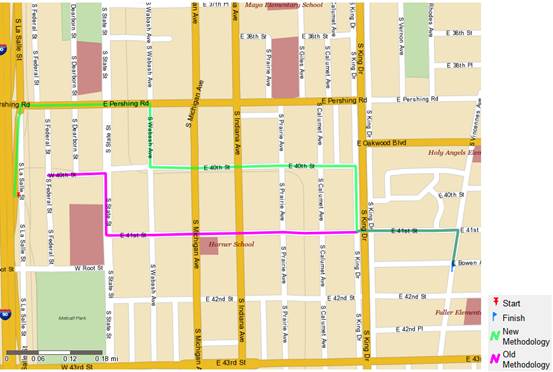
Les noeuds sont marqués en jaune, les routes locales en noir, les autoroutes en bleu. Les calculs guzzler, qui ne sont pas visibles pour l'utilisateur, sont affichés en rouge.