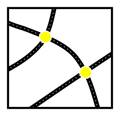
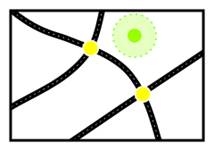
指定された開始点から、燃費は最初の検索半径内のノードを探します。
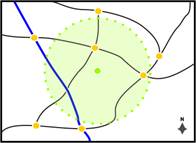
最初の検索半径は、始点の周囲の円形の領域です。 この領域のサイズは、設定ファイルで変更できます。 デフォルトでは、最初の検索半径は2マイルです。
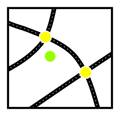
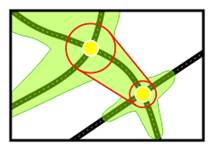
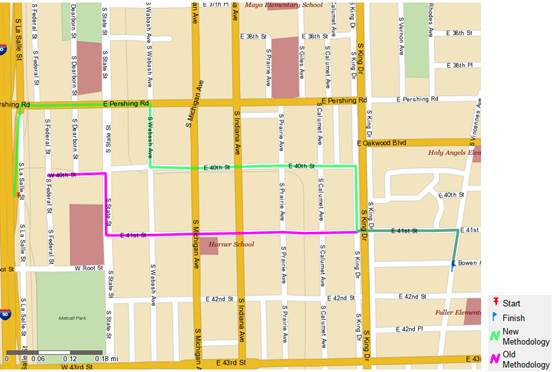
最初の検索半径内にノードがある場合、最適なノード (最も遠い移動が可能) は、道路網が結合されている場所です。 複数のノードが最初の探索半径内にある場合、最適なノードが選択され、割り当てられた時間内で最も速くかつ最も遠くに移動するノードが選択されます。 新しい方法論では、ノードの開始ではなく実際のポイントから計算が開始されるため、オフロード時間を含む真の計算が計算されます。
特定のケースのロジックは、最も近いノードからのアウトバウンドセグメントがすべて一方向(例えば、ハイウェイ上)の場合に呼び出されます。 新しい方法論では、制限されたアクセス道路と一方通行が考慮されています。
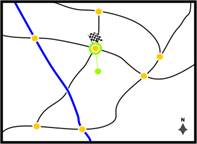
まれに、最初の検索半径内にノードが見つからず、従って道路網が結合されない可能性があります。 これについて説明します。
最初のノードに到達するまでの時間は、計算に含まれるようになり、終了点に到達するまでの時間になります。
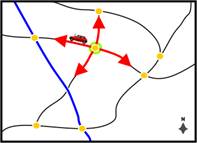
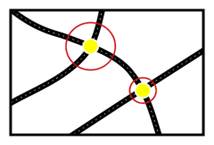
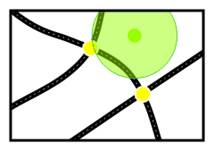
道路網はノードから外側にトレースされ、利用可能な時間内に到達可能なすべてのノードを見つけますが、それは、異なる道路セグメントおよび道路網クラスで速度が異なることの影響を受けます。
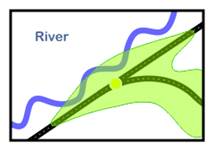
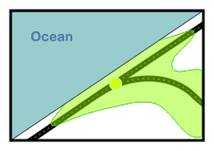
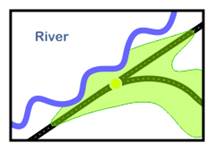
フェリールートは、道路セグメントと同じように扱われ、同じ方法でそれらに関連付けられている速度を持っている。
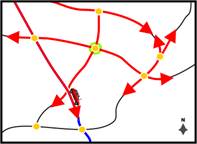
到達した各ノードについて、Guzzlerは残りのドライブタイムを計算し、次にさらにノードが到達可能かどうかを再度調べます。 このプロセスは、到達したすべてのノードに対して繰り返されます。
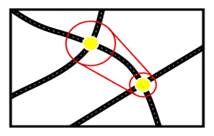
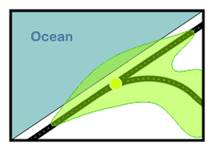
Drivetime の計算が発展するにつれて、我々はどのように異なる道路の速度は、形状に影響を見ることができます。 より速い道はより遅い道から生成されるそれらがより短く、より厚い間、より長い先細りの多角形の「腕」を作り出す。
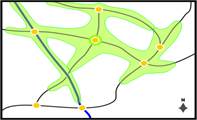
選択されたドライブタイム内に他のノードに到達することができない場合、残りの時間はオフロード速度で加算されます(米国では2.5mphに設定されます)。 Drivetime に到達したすべてのノードから、オフロードバッファを作成し、Drivetime ポリゴンを描画すると、残りの時間も横方向に追加されます。 これについて、より詳細に説明されます。